
量子韌體與量子計算階層
- Physics Today 專文
- 撰文者:Harrison Ball、Michael Biercuk、Michael Hush(中文編譯:林祉均)
- 發文日期:2022-01-25
- 點閱次數:2275
量子控制協定有潛力成為抽象演算法與操控非完美硬體之間的橋樑。
近幾年來,量子電腦已經從實驗室的研究課題快速發展成為用多個稱為量子位元的訊息載體運作的系統。在2019年時,Google旗下的研究人員使用了僅僅 50 多個量子位元的量子電腦完成傳統裝置無法處理的計算,換句話說,他們首度展示了「量子霸權(Quantum supremacy)1」。研究人員目前已經快要能夠透過量子電腦,來處理一系列棘手的問題,包括藥物開發、化學工程、密碼破解與資訊安全等等(關於量子密碼學的討論,請見Marcos Curty等人所著的同期文章)。目前發展中的啟發式演算法和量子近似演算法,有望在未來十年內讓量子電腦以更好的效能,解決富含商業價值的計算問題,達成所謂的量子優勢(Quantum advantage)。
科學家在研究如何使用量子系統做實務運算時意識到限制效能的往往不是系統大小,而是硬體的缺陷。雜訊和錯誤不僅是量子電腦的最大罩門,也同時限制了量子電腦能運行的演算法。為了改善裝置效能,研究人員不只嘗試了修改量子電路等被動方法,更力求主動出擊:透過量子糾錯(Quantum Error Correction, QEC)將硬體缺陷影響降低的相關研究也已經進行數十年。QEC是一系列必要的演算協定(algorithmic protocol)用來確保計算錯誤都被找出並糾正;不過其複雜性與資源需求量使得人們開始探尋其他可能的附加技術,希望能藉此省下計算的負擔,同時達成優化的效能。
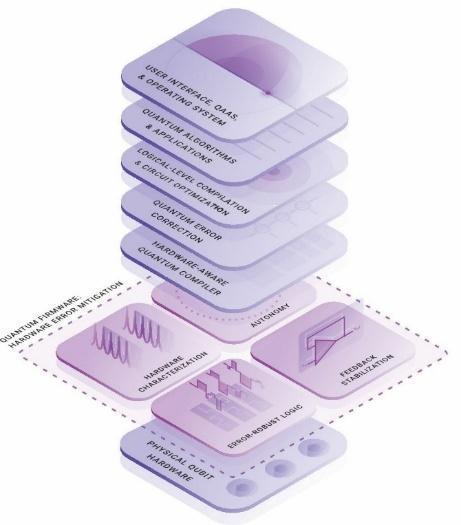
量子韌體(Quantum firmware)是一堆在連結量子硬體與量子計算階層中更高、更抽象的階層之間協定(protocol)的推廣(見圖1),更準確地來說,量子韌體負責規範如何操控硬體使系統達成更高的穩定度並減少各種錯誤;簡而言之,它可以「虛擬」底層不完美的硬體。因此在量子計算層上層的抽象層透過量子韌體與量子位元互動與直接與量子位元硬體互動的效能會不一樣。2(見Anne Matsuura, Sonika Johri, and Justin Hogaboam, Physics Today, March 2019, page 40)
會選用「韌體」這個詞主要的原因是:儘管這些例行程序通常是由軟體來定義的,但由於它們緊連著硬體層級,對於更上層的抽象層來說它們基本上不存在;而這類針對低階層的控制方法,十分類似資訊工程中其他形式的韌體,例如DRAM(動態隨機存取記憶體)的重整程序能讓傳統硬碟能夠不受漏電電流影響使其更加穩定,這種程序負責排程並定義相關的控制與量測作業,進行邏輯運算與執行等等;而DRAM的使用者除了在執行存取記憶時間稍許被延遲之類的狀況外,也幾乎不會注意到它的存在或功能。
以上簡單的介紹了這些名詞與系統,那麼實際上該如何做到呢?
圖1、一台容錯率高的量子電腦由不同階層組成,每層對應到不同的軟體抽象程度。最頂部的是量子服務(QAAS),也就是使用者可以透過雲端等媒介接觸到的功能。下一層是透過開發者工具所編寫的量子演算法與應用程式,能夠執行高度抽象的運算。這些程式碼建立在第三層之上,藉此執行塊碼中的電路。在高容錯率的計算系統中,這段過程是透過QEC來對邏輯位元執行,不過QEC本身的程式碼和其他相關的工作又另外擁有一個專屬的階層。裝置之間的實體連結,以及任何失敗耦合的修正,則是由硬體適用編譯法負責。再往下一層,是位於硬體上方的量子韌體,專職於減少硬體錯誤。關於硬體的校正、調整、測試、穩定化、自動化等等的工作,都是由韌體處理。 |
背後的科技
量子操控3是量子韌體的運作關鍵,而量子操控的重點是「在這量子定律所主宰的系統裡如何有效地使他們乖乖聽話?」說到底,量子操控關心的是古典世界如何與量子裝置互動,也使研究人員可以獲得更多關於系統動態的資訊,並開發計算、感測、與計量等各種性能。(關於量子操控的更多資訊,請見Ian Walmsley and Herschel Rabitz, Physics Today, August 2003, page 43)
量子操控的出現很大一部分得歸功於數十年來關於核磁共振與電子順磁共振的研究工作;這些系統透過共振射頻或微波輻射的脈衝來操控原子核或電子自旋產生的半古典磁偶極,而系統中硬體的缺陷時常影響分子光譜的品質。在1950年,Erwin Hahn展示了如何用特殊的動態控制程序來減緩磁場不均勻對光譜解析度的影響,這套做法如今被稱為自旋迴訊(Hahn echo)。除此之外,此發現也發展出可用來分析自旋系統時間演化的平均哈密頓理論(average Hamiltonian theory)及得以抵銷分子中不利的自旋耦合影響的動態解耦合。4
從1980年代開始,出現了另一門平行發展的研究領域,試圖將控制工程中的概念與數值工具應用在量子相干的裝置中,包括處理線性系統(例如量子諧振子5)以及發展出合適的數值工具讓不完美的硬體能夠有效的操控自旋系統。量子最佳控制方法近期已經被延展到更廣義的希爾伯特空間與哈密頓算符7,成為最佳化量子實驗系統性能的強力工具。8
量子計算的硬體和核磁共振十分類似,不論是離子阱、中性原子、超導電路等技術都需要仰賴設計精準的光-物質交互作用,才能執行量子邏輯運算(見Lieven Vandersypen and Mark Eriksson, Physics Today, August 2019, page 38)。這類行為組成了最原始的機器語言:與超導量子位元共振的微波高斯脈衝可做為一個X運算(X operator),也就是量子版本的反閘(NOT gate)作用在一個量子位元上;另外一種可當作受控反閘(controlled-NOT operation)的脈衝則是作用在一對不同位置的量子位元上,效果類似古典的互斥或邏輯閘(XOR gate)。量子演算法就是由這些電磁訊號透過各種時間及空間的組合建造而成。
由於量子位元與自旋二分之一的系統的物理可以相互對應,因此我們得以自然地將量子操控技術轉移到量子計算的領域中以對抗硬體缺陷和環境影響,改善演算法的成功率。史丹佛大學的N. Cody Jones等人在2012年的成果是各種將量子操控與量子計算融合最知名的一個例子;他們在量子硬體與高階抽象演算中間引進所謂的虛擬層(virtual layer),並經核磁共振的啟發使用了複合脈衝技術。他們的工作為這篇文章所討論的量子韌體層打下了堅實的基礎。研究人員今日已經更加清楚量子控制的效用以及與量子韌體層互動的高階抽象軟體結構。
技術目標
目前的量子韌體需要肩負以下這些技術任務:
透過免測量的開迴路控制,進行抗錯強韌的量子邏輯運算
在硬體層級上,透過測量進行閉迴路回饋穩定化
對微小硬體進行測試,校正,雜訊辨識,以及哈密頓參數估計
透過機器學習的概念,讓以上任務能在大型系統中自動執行
開迴路控制指的是不需回饋的執行動作,有點像是計時的自動灑水器,它不知道土壤濕度或是降雨資訊,單純透過定時來維持草皮翠綠。這種作法不只能省下計算資源,也經過證實能有效地穩定量子裝置;即使在自由演化或進行非平凡邏輯運算時仍舊能保有這兩項優點。9量子電腦進行開迴路除錯時,用來操縱量子硬體的指令會被重新定義,使其可以完成相同的數學運算卻不會被如環境磁場震盪的外在雜訊影響。這類除錯的實際運作,通常是透過改變操縱硬體系統的電磁場(見下方說明方塊)並用哈密頓模型或機器學習方法推算出改變造成的演化模式。因此,量子韌體所界定的控制程序能夠組成一套有效的抗錯強韌的機器語言,用來控制量子硬體。
單量子位元運算的邏輯閘最佳化 目前的中等尺寸超導量子電腦提供了一個理想的平台來進行量子控制的研究,因為它們允許透過雲端存取高級硬體。位於雪梨和洛杉磯的新創量子計算機構Q-CTRL和旗下研究團隊便是在這樣的平台上(一台IBM的雲端量子電腦)探索真實系統中量子控制最佳化的效能。他們使用了特製的類比層程式設計,能夠直接控制實體訊號。 以下我們示範如何打造一套有效的機器語言來清楚定義量子邏輯運算,並確保其不受一般硬體擾動的影響。上圖中展示了幾種不同方式,進行包立X運算「自旋翻轉」: $$ \sigma_x = \vert 0 \rangle \langle 1 \vert + \vert 1 \rangle \langle 0 \vert = \left[ \begin{matrix} 0&1\\ 1&0\\ \end{matrix}\right]$$也就是傳統邏輯中反閘的量子力學版本。在上圖中的每個布洛赫球中,量子態由單位向量的箭頭表示。沿著某條路徑,箭頭指向會從球的北極移到南極。接受預設操作的量子位元(小圖a)和接受抗錯強韌脈衝的兩個量子位元(小圖b, c),兩者走的路徑相當不同。 包立X運算利用微波輻射來加入一個可控制的哈密頓算符 $$H_c(t)= \frac{1}{2} \left( \Omega(t) e^{i \phi (t)} \hat{a}\right)$$這裡的 \( \hat{a}\) 是 \( a\) 和 \( a^{\dagger}\) 的函數,其中 \( a\) 和 \( a^{\dagger}\) 是超導量子位元能態的升降算符。(我們只考慮能量最低的兩個態,做為一個等效的量子位元)。哈密頓中的耦合項 $$ \Omega (t) e^{-i \phi (t)} \equiv l(t) + iQ(t)$$ 代表控制脈衝的波形,而\( I(t) \)和\( Q(t)\)也就分別表示使用者可以控制的參數。 在預設的X運算中,\( I(t) \) 由連續兩個類似高斯波包的脈衝組成,而 \(Q(t) \) 的強度非常小。這兩道脈衝主要讓量子位元的量子態沿著布洛赫球的緯線遷移;在量子韌體的作業程序中,X運算的原始物理定義被更換成以 \( I(t) \) 與 \(Q(t) \) 為參數的形式。 要確保量子邏輯閘能在雜訊干擾之下正確運作,我們可以透過數值最佳化來尋找某個代價函數的極小值。小圖b, c中的操控程序是從 \(H_c(t) \)推導得出,過程中加入了一些平滑函數,用以確保來自室溫電子儀器的訊號能忠實地傳給稀釋冷凍機中的低溫量子位元。由於控制波形中加入了除錯程序,使用最佳化控制的位元量子態需要在布洛赫球上走一段比較曲折複雜的路徑,而不是像預設控制那般直接從北極走緯線到南極。要執行這種複雜的路徑通常需要較長時間的脈衝刺激。 這裡提到的最佳化控制方法是被打造來抵抗X運算過程中各種可能的錯誤,包括 \(\Omega (t)\) 的強度,或是外加脈衝的頻率。為了測試這種控制程序的性能,實驗人員會在脈衝強度或脈衝頻率含有準靜態誤差的情況下,反覆執行這個控制程序。而該邏輯閘有多少機率會演化到錯誤的量子態,就是它的失真率(小圖d, e)。圖中可見,就算在脈衝的強度和頻率都加入極大的誤差,兩種最佳解仍然屹立不搖,呈現水平的反應。被設計來抵抗頻率誤差的控制程序(小圖b),的確在頻率誤差下維持穩健的表現(小圖e);而在強度方面,相對應的控制也能在誤差下保持低失真率(小圖c, d)。 小圖d和e中的陰影區域表示適當地選擇最佳化脈衝為整體性能所帶來的進步。除此之外,實驗中也曾經展示過能同時應付兩種誤差的抗錯控制程序。(關於以上實驗細節,請見參考資料9。) |

另一方面,閉路控制的執行動作則取決於系統的測量結果。這種方法相對較為受限,因為量子力學中的測量具有破壞性;不過,還是些有方法可以在不破壞計算所需資訊的情況下硬體層級進行回饋穩定化獲取資訊內容。事實上,大規模量子電腦的最高標準— QEC,便是閉路回饋的一種,它能夠透過輔助量子位元進行間接測量。硬體層級的回饋穩定化該如何進行直接整合,至今仍是活躍的研究領域,其中不乏許多令人期待的新發現。10
硬體特性分析(在控制理論中稱為系統識別)受益於大量實驗和理論的發展,11其背後的技術可以用來補足外部基準化流程;後者首先取得可行動的微觀資訊,用於系統最佳化與調整,並藉此量化硬體的整體性能。除了直接壓制雜訊外,雜訊頻譜學也常被用在設計開路控制時獲取資訊的方法,可以用一個量子位元測量一組時域的控制系統探測不同頻率的雜訊。
硬體的缺陷可以由許多不同方法找出,這些方法通常被歸類為哈密頓參數估計法。只要使用這方法就有機會找出裝置與外加控制場的耦合率,並得知訊號傳遞到量子位元途中的損耗等等;更複雜的操作則被用來探測裝置中不希望出現的能階頻率,或是分析量子位元之間未知的耦合作用。這類程序獲取的資訊可以提供給開路抗錯控制以及負責回饋穩定化的動態模型。
以人工智慧為基礎的自動執行屬於量子韌體中最後一類的操作,也是量子計算這門學問中最具開創性的新興領域。未來的大規模系統將會需要在最少人力介入的情形下利用高效程序來調整、校正、測量、以及最佳化其硬體層級。目前有個包含機器學習、機器人控制、資料推論等跨領域的成果已經成功展示如何引進適應性的測量程序來減少破壞性測量的數量1,12,並實現高速且自動的系統啟動與執行。
整合策略
任何量子控制的實際做法都必須為了硬體系統的需求進行量身打造,每種作法或多或少都需要用到前述的一些方法。不過這些控制技術之間有許多共通點,也逐漸被引入最尖端的實驗或商用等級的量子電腦中(關於量子電腦的商業化,請見Physics Today, November 2020, page 22)。因此,研究人員便希望能把重要的功能組織起來,整合成為一個可以辨別的抽象階層。不過創造出這個組織化的結構是一回事,而量子操控該如何整合至真實系統中又是另一個挑戰。
其中一種做法是將控制功能直接整合至量子計算階級中會使用到該功能的階層裡。期概念是,高階的抽象階層(例如編譯與應用程式設計)和其他為特定硬體系統打造的低階量子控制程序之間的所有操作都是由量子韌體負責定義並執行,而韌體可以被嵌入合適的計算硬體中以使量子相干硬體虛擬化。也就是說,因為韌體改變了硬體的表現與性能,較高層的抽象化階層便「看不到」基礎硬體的原始性能。
打造一個專屬於量子韌體的階層可以帶來幾個潛在的好處;首先,像Cirq、Quil、和Qiskit這類高效率的高階語言框架的發展使得應用與演算法層級的能力大增。為量子控制的整合建立一個標準的框架或許能驅使量子控制與機器學習的社群為高效硬體控制開發出更多元的技術方案。
如果為韌體設立一個專屬層級,傳統電腦硬體中不同部件的控制功能就能自動整合並協調,而這些過程利用局部處理來支援自動排程和非監督式穩定化,執行大量最佳化作業的計算資源分配以及用於執行即時處理的低延遲程式邏輯,譬如將一個局部的微控制器可以在排程之下,啟動雲端上某個多位元閘的數值最佳化(見圖2)。而這種方法可以用硬體來調整最終控制波形調整,再寫入內嵌記憶體中。隸屬於該微控制器的是一個可調式邏輯閘陣列,它負責指揮訊號合成硬體去輸出操控量子位元用的波形並處理量子位元的測量結果。(最後仍會保留一個邏輯上分開的「內嵌作業系統」負責處理傳統電子儀器的相關功能)。
圖2、量子韌體是在量子計算階層中的其中一個抽象化階層,其行為由內嵌的微處理器主導。這些微處理器能夠存取雲端計算資源來處理計算龐雜的工作(例如開路控制最佳化),並將硬體虛擬化以便高層軟體與其互動。在這個概念圖中,微處理器將指令傳到可程式化的邏輯裝置(例如現場可程式化邏輯閘陣列),而這些裝置負責即時處理測量結果,並將資訊提供給實體層級回饋穩定化,或是其他基於測量結果的決策過程等等。它們也會提供指示給直接數字合成或任意波形產生器等其他硬體部件。圖中箭頭表示元件之間訊息傳遞方向。(圖片來自:Q-CTRL) |

研究人員的近期目標是打算探索層與層之間的界線是否能被模糊化,藉此提升性能。其中一個可能性是將硬體-韌體共同設計,如此一來可以將實驗性軟體中特定的重要工作整合至傳統電子儀器中13。
考慮到量子控制所帶來的功能與好處,重新構思量子電腦的整個軟體層級架構或許能帶來不同的契機。這類做法的可能優勢特別凸顯在硬體感知編寫的技術中。這種技術透過最佳化控制來產生高還原度,硬體最佳化的邏輯塊,接下來便可以把量子演算法編譯進一系列數值最佳化的類比控制序列,並用來取代數量較少但較通用的普遍邏輯閘。14
系統層級的影響
不論量子韌體最終以何種技術實現,近期實驗讓我們了解到一件事:韌體中量子控制的能力將影響,甚至重塑,高層抽象化層級的型態。這是因為量子韌體的虛擬化效果從根本上改變了底下硬體的行為表現,尤其是與硬體錯誤特性相關的行為。
開路控制策略被廣泛使用於先進量子電腦硬體中,負責進行抗錯。開路控制的其中一個例子是絕熱邏輯閘導數去除(DRAG,derivative removal by adiabatic gate)脈衝。在超導量子位元中,DRAG脈衝的邏輯閘錯誤數量已被證實比傳統的高斯脈衝少一個數量級。更近期的實驗結果顯示,經數值最佳化的邏輯閘能減緩硬體缺陷對雲端量子電腦的影響,藉此抑制脈衝強度,共振頻率,串擾等誤差。由於量子韌體所處理的那些錯誤過程,其影響往往遠大於一般所期待最佳情況下的基準化流程,因此這些實驗的展示效果格外出色。
不論是在研究等級的系統還是一般大眾都能使用的雲端系統,同一個裝置中的量子位元錯誤率在最佳與最壞情況之間往往相差一個數量級以上。這些錯誤來源可能是硬體製造差異、量子位元之間耦合情況不一或是周遭環境的電磁雜訊,而量子韌體可以讓硬體性能在時間與空間上變得更加穩定一致。在實際系統中引入最佳化量子控制作業能將所有量子位元的錯誤率壓低到接近最佳值;另外,在雲端或實驗室裝置中,漂移強韌控制能將其校正有效時間從6到12小時拉長到五天以上。9
這些技術上的進步為何重要?首先,目前的演算法編譯器可以透過增加編譯電路複雜性來避開性能較差的裝置來提升整體表現。但是,在性能差異較大的大規模系統中,這段編譯過程變得較為複雜,在性能最差的裝置之間運送資訊便需要更多的邏輯閘和時間。透過量子韌體我們可以將裝置性能在時間與空間上均值化,並簡化高階編譯程序,15 藉此減少執行演算法的複雜度與時間耗費。
量子控制也將對於QEC的表現有長遠影響;不論是硬體層級的回饋穩定化,還是韌體中的開路控制,都利用了雜訊在時間與空間中的變化相對平緩這個特性,也因此這些策略無法處理真正隨機的錯誤差。另一方面,由於QEC的基礎則是針對較普遍的、統計上獨立的誤差,所以量子韌體可以補齊QEC的不足,進而針對廣大範圍的誤差進行修正,同時也將其餘的誤差有效調整為QEC可以處理的型態。16除此之外,由於量子韌體能夠將量子位元的表現均質化並減少剩餘誤差的統計關聯性,所以QEC所需要的資源量也因此減少。可見這的確是個一加一大於二的組合。
量子韌體的未來
量子計算本身是一門複雜的學問,因此演算法設計者和終端使用者需要一個不需要硬體相關的專業知識也能有效使用量子電腦的架構。他們希望高效能量子電腦能夠穩定地表現;就算演算法結構有細微的更改,還是能持續提供輸出。有了量子韌體便能達成以上的任務。
相對於原本較陽春的邏輯閘執行方式,量子控制經證實能將量子邏輯閘運算的性能提昇十倍。9 同樣的,動態記憶穩定化已經將量子位元的生命週期拉長到分鐘的等級。在這些設定中,性能優化仍舊被非同相過程與傳統硬體所限制,不過兩者隨著時間演進以及針對量子電腦市場的特製化逐漸興盛,都呈現穩定的進展。所以,我們預期控制系統和裝置性能將會和量子韌體程序的發展同步前進。
抗錯強韌開路控制等量子控制技術對於演算法表現的影響可以藉由一些指標來量化,譬如量子體積(quantum volume)就是其中一種指標;這個指標可以反映結構方面的特性(包括硬體連接性),還有裝置等級的參數(例如整體裝置中單一或雙量子位元的錯誤率)。18 Honeywell宣稱他們只需幾個量子位元就能達到128的量子體積;相較之下,IBM的較大系統卻只有64。這個結果顯示硬體的性能才是主要的瓶頸。
根據實驗顯示,將單一與雙量子位元的錯誤率減少十倍對於系統層級的表現就有聚大的影響。而其中受到影響最大的是那些連接性較低的裝置,因為將裝置中量子位元資料在空間中重新排列需要許多次的多位元對換作業。裝置規模正快速成長,Google和IBM都分別釋出了包含一千個量子位元的系統藍圖;而量子控制提供了一個方法,讓我們確保演算法層級的系統效能可以跟上系統尺寸的成長。
PAINTING BY GERALDINE COX |

我們相信,如果沒有將量子控制技術整合進入量子韌體的抽象化階層,那麼建立與操作大規模的量子電腦終究是不可能的任務。自動駕駛車輛、行走機器人以及進階飛行電子系統,都再再顯示了動態控制與自動化的重要性。同樣的,量子電腦裝置在校正、調整、和最終達成量子霸權的過程中,將需要高階控制理論的關鍵協助。機器學習與機器人控制領域中的許多技術,都能有效提高效能與自動性。如此一來,未來的量子資訊開發者才能放心的往抽象世界探索,不用擔心底下硬體的諸多細節。
本文感謝Physics Today (American Institute of Physics) 同意物理雙月刊進行中文翻譯並授權刊登。原文刊登並收錄於Physics Today, August 2021 雜誌內 (Physics Today 74, 3, 28(2021); https://doi.org/10.1063/PT.3.4698)。原文作者:Harrison Ball、Michael Biercuk、Michael Hush。中文編譯:林祉均,國立清華大學物理系學生。
Physics Bimonthly (The Physics Society of Taiwan) appreciates that Physics Today (American Institute of Physics) authorizes Physics Bimonthly to translate and reprint in Mandarin. The article is contributed by Harrison Ball、Michael Biercuk、Michael Hushand is published on (Physics Today 74, 3, 28(2021); https://doi.org/10.1063/PT.3.4698). The article in Mandarin is translated and edited by J.-R. Lin , Studying at the Department of Physics, National Tsing Hua University.